200/03/17 【電子回路編TOPに戻る】
小学校の理科の実験などで、乾電池を使ってマブチモーターを動かしたりしませんでしたか?今回は、ロボットの関節を動かすための動力をマブチモーター(DCモーター)で得ようと思うので、先ずはモーターを動かすことから始めてみることにします。
4−1.乾電池でDCモーター(マブチモーター)を回す
|
単一、単二、単三などの1.5Vの乾電池をDCモーターにつないで見ると、モーターは簡単に回り出します。手持ちのもので実験してみたら、赤線を+(プラス)、青線を−(マイナス)に繋ぐと、右回転(時計回り)を始めました。 |
 |
今度は、乾電池の向きを逆にして、赤線を−(マイナス)、青線を+(プラス)に繋ぐと、左回転(反時計回り)を始めました。どうやらDCモーターは、電池の向き(極性)を逆にすると、逆に回転するようです。(え?そんなこと誰でも知ってる?) |
モーターの回転方向を変えるのに、いちいち乾電池をつなぎ直しているのでは大変なので、スイッチ操作でワンタッチで変えられるようにしたのが、下の回路です。
 |
スイッチ1と4をONにして、スイッチ2と3をOFFにすると、モーターの赤線が乾電池の+(プラス)につながり、青線が−(マイナス)につながるのが分かりますか?つまり、モーターは右回転します。 |
 |
今度は、スイッチ1と4をOFFにして、スイッチ2と3をONにします。すると、モーターの赤線が+(プラス)、青線が−(マイナス)につながります。なので、モーターは左回転します。乾電池の赤線/青線と、モーターの赤線/青線が、互いに色違いにつながる様子が分かりますか? |
この回路では、スイッチ1と3、またはスイッチ2と4を同時にONにすると、乾電池の+(プラス)と−(マイナス)がショートするので、してはいけない操作です。
全てのスイッチをOFFにすると、乾電池もモーターも、何にもつながっていない状態(オープン状態)になります。回転中のモーターに対して全てOFFにすると、惰性で少し回転を続けて、すぐに勝手に止まります。
スイッチ1と2、またはスイッチ3と4をONにすると、モーターの赤線と青線がショートします。回転中のモーターに対してこの接続を行なうと、モーターにブレーキが掛かります。モーターは電気を与えると自力で回転しますが、逆に無理やり外からの力で回転させると発電します。ママチャリ自転車のライトのダイナモが良い例です。回転中のモーターの両端子をショートさせると、その場で発電機として働き、ショートさせた回路には大きな電流が流れます。この電流によって、今度は回転を止める方向に回転力が発生し、ブレーキとして働きます。
4−2.DCモーター駆動用IC
前項でご紹介したスイッチを4個使う回路でも、いちいち手動でスイッチ操作していたのでは大変です。各スイッチをトランジスタスイッチに置き換えて、外からの制御で操作できれば簡単です。で、そうした回路をブリッジドライバ回路と言います。更に、そうした回路をパッケージ化したICがいくつも存在します。下のICは、数年前に買ってあったドライバIC T7279APで、ひとつのパッケージに、モーター2個分の駆動回路が入っています。最近も秋葉原で見かけたので、追加でいくつか買っておきました。確か数百円。
下のICの中身を示す回路図も、ちょっと難しそうに見えますが何の事はありません。上で紹介した、スイッチが4個付いた回路と全く同じです。
5-8(10-7)端子間にモーター用の電圧を加え、4-6(11-9)端子間にモーターをつなぎます。14-1端子間に制御ロジック用の+5Vを加え、3,2(13,12)端子間が動作を決める制御端子です。

TA7279AP VCC 制御用+5V VSA,VSBモーター用 最大+25V 1.0A |
 |
制御動作
| VIN1 | VIN2 | OUT1 | OUT2 | モード |
| 1 | 1 | L | L | ブレーキ |
| 0 | 1 | L | H | 正転 |
| 1 | 0 | H | L | 逆転 |
| 0 | 0 | ハイインピーダンス | ストップ | |
ひとつのモーター駆動部に対して、2個の制御入力(VIN1,VIN2)があり、この2bitでモーターの動作を制御します。制御入力はTTLレベルの+5Vで、実際にモーターを駆動する部分の最大値は+25V、1.0Aまでです。
通常はVSA,VSB(5-8,10-7端子)に+3V〜+5V程度を加えて、モーターを動かすことになると思いますが、+1.5V(乾電池1個分)だけを加えても、モーターはウンともスンとも言いません。これは、トランジスタ2個分の電圧降下があり、モーターに加えられる電圧が減少するためです。
4−3.DCモーター駆動基板
TA7279APを使って、DCモーターを駆動させるための基板を、ユニバーサル基板で作ってみました。
 |
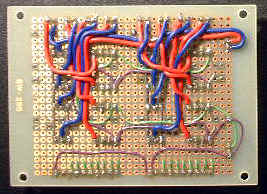 |
TA7279APを4個付けて、合計で8個のモーターを駆動できます。TA7279APの両脇についているヒートシンク板は邪魔なので、上向きに折り曲げています。ICの説明でも触れましたが、1個のモーターを制御するのに2bit必要なため、8個分制御するのに16bit分のポートが必要になります。
部品面に付いてる2pinのコネクタ8個が、モーターに接続するコネクタで、左上横向きに付いてる2pinのコネクタがモーター用電源コネクタです。下についてる10pinコネクタ2個が、8bitずつの制御用コネクタで、左下横向きについてる2pinのコネクタが制御用電源コネクタです。
はんだ面では、モーター駆動部分の配線に太めの線を使い、制御用配線には細い線を使っています。
回路図は以下の通りです。スペースの関係でIC2個分しか載せてませんが、あとの半分も同じ回路です。
AKI-H8/3048F CPU基板のPIOポートに接続して、2bitずつの制御を与えてあげると、モーターの回転/停止と回転方向を制御することができます。でも、この回路と単なるPIO制御だけでは、回転速度まで制御することはできません。回転速度を制御するには、PWM(Pulse Width Modulasion パルス幅変調)制御と呼ばれる手法が必要となります。これについては、別の機会にご紹介します。