2002/08/31 【アクチュエータ編TOPに戻る】
今回は、TekuRobo2号の写真をご紹介します。一応歩行に成功したとは言え、まだまだ完成の域には程遠く、問題点も沢山抱えています。このページでは、現状のTekuRobo2号の抱える欠点も含めて、ありのままご紹介しようと思います。「ロボット作りは楽しいのだ」の2002/08/30版でも歩行までの経緯や問題点などを書き綴っていますので、そちらもご覧下さい。また、TekuRobo2号の構想と展開図もご参照ください。
■1.全体写真
| 正面写真 | 斜め右写真 |
|
|
| 左横写真 | 背面写真 |
 |
 |
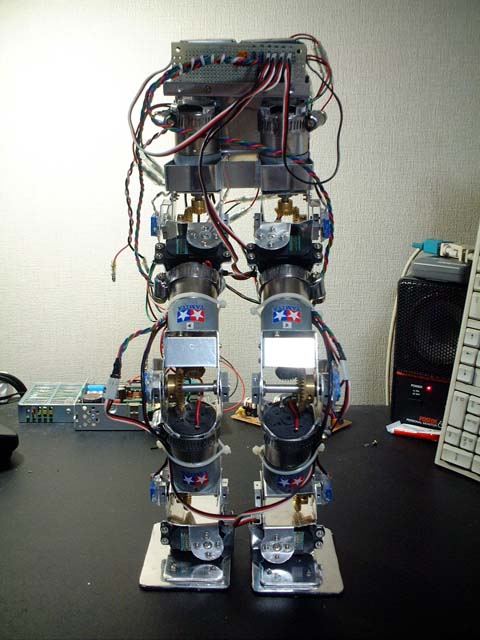
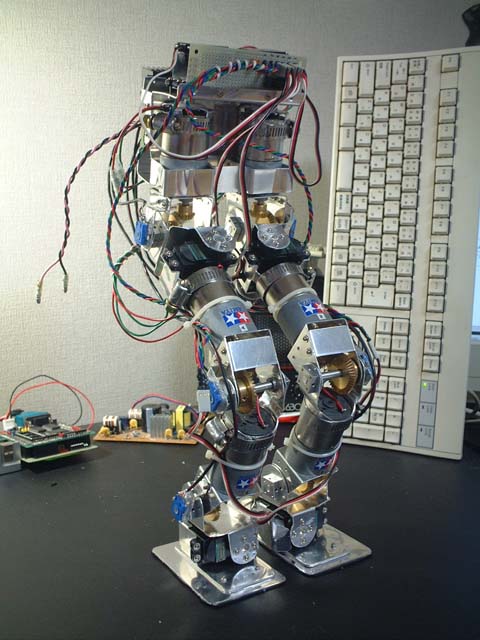
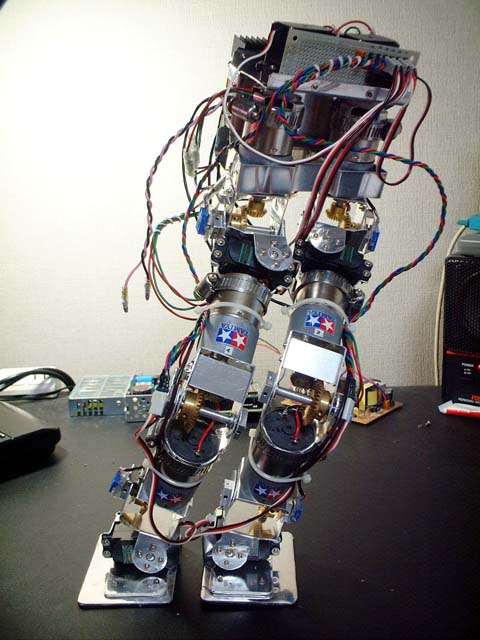
上の4枚は全体写真です。基本的には1年前に作成した構想の通りに製作しています。前後方向に駆動するためのモータにはタミヤのギヤードモータ3633K200を6個実装し、左右に体重移動するためのモータにはKO PROPOのPDS-2144FETを4個実装しています。この他に胴体上部に方向転換するための駆動用にPDS-2144FETを2個実装しています。ギヤードモータとサーボモータを要所で使い分けたハイブリット方式です。
ギヤードモータをサーボモータと同様にPWM波形のパルス幅で角度制御するため、背中に専用のドライバ基板を背負っています。最終的には胸の部分にSH2マイコンボードを実装するつもりでしたが、現在は取り付けていません。左横写真で、胴体部分と背中のドライバ基板の間に空いた空間には、ラジコン用の7.2Vバッテリーを2本実装させる予定でした。
機体の周りの配線はまだ整理されていません。歩行実験の際に信号線と動力線の間で干渉を起こし、暴走の原因となったため、実際の歩行の際には束線類は全てはずして「モジャモジャ」状態で動かしました。
各関節の横に取り付けてある青く四角い部品は関節の角度を検出するためのポテンショメータで、シールド線によって背中のドライバ基板に接続して、ギヤードモータが所定の角度まで動いたことを常に監視するためのセンサーとして利用しています。左右体重移動方向にはポテンショメータは取り付けておらず、サーボモータは与えているパルス幅の通りに動いてくれているということを前提としています。
■2.各部の写真
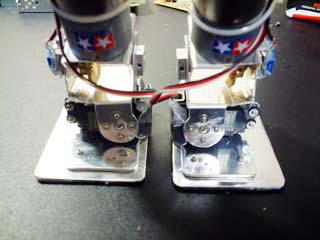 |
【足】 よく見ると、ちょっと小さめの足が、一回り大き目の板に乗っていることが分かると思います。実は、もともと小さめの足だけで歩行の実験を行っていたのですが、どうしてもバランズを崩して転倒してしまうため、やむを得ず、もう一回り大きな板を履かせました。特に左右方向に広げたのですが、これだけで大分転倒しづらくなりました。 足裏の面積を大きくすれば転倒しづらくなるのは当然です。やはり目指すのは小さな足でも転倒せずに安定した歩行ができることです。 |
 |
【ヒザ】 太もも部分に相当するギヤードモータの本体に、直接コの字型のシャーシを取り付け、それにシャフトを通して傘歯車を取り付けています。シャフトを受けているシャーシ部分にはベアリングを取り付けてあります。この写真では見えませんが、ギヤードモータの駆動シャフトにも傘歯車を取り付け、写真で見えている傘歯車と噛み合わせています。 写真のコの字型のシャーシは、大きな負荷がかかると菱形に変形し、傘歯車どうしのかみ合わせが外れてしまう症状が出ます。そのため、少しでも強度を増やすためにコの字型シャーシに変形防止の板を取り付けてあります。 |
 |
【股関節】 開脚方向(左右体重移動方向)の駆動用のサーボモータと、腰の部分を連結している股関節部分です。太ももを前後方向に駆動する構造は、基本的にヒザの部分と同じです。 写真奥の左足股関節の手前に見えている四角いブロック状の部品はシャフトとシャーシを固定するための軸受けで、関節を曲げる場合の負荷を全て支えています。各関節の両側につけてあります。イモネジでシャフトを強く締め上げていますが、常に前後両方向に変化するトルクが直接かかるためにすぐ緩んでしまい、ボディー全体の剛性からすると大きな弱点になっています。 |
 |
【胴体】 太もも部分を前後に駆動するためのギヤードモータ本体が収容されています。なので、電子回路やバッテリーを搭載するスペースが限られてしまうのが難点です。このギヤードモータは、更に上に搭載されているサーボモータに連結されており、足先を左右に向ける方向に駆動されます。 全てのギヤードモータの上部(配線端子側)は、他のシャーシとの連結にホースを水道管に固定するためのリング状の固定金具を利用しています。非常に強固に固定することができ、微妙な位置合わせなども行うことができるため、以外と重宝します。
|
 |
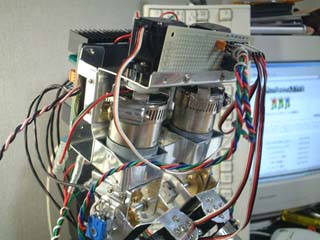
【背中】 背中にはギヤードモータドライバを背負っています。6チャンネル分のギヤードモータの制御と駆動を行っています。特に配線が集中するところであり、今後は各関節部分に分散させるような検討が必要になると思います。 配線が汚いままですみません...。 |
 |
【頭上】 写真は頭上から見たところです。斜めになって実装されているのは方向転換用のサーボモータです。また、背中のドライバ基板と胴体との間には、バッテリーを実装するためのポケットがあります。 |
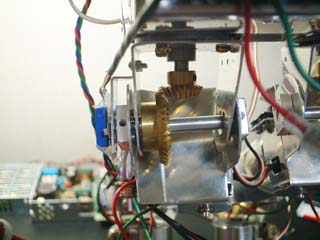 |
【お尻方向】 写真はお尻側から見た関節部分です。ギヤードモータと傘歯車、シャフトと固定用軸受けとポテンショメータの関係が良く分かる位置です。ヒザと同様にコの字型のシャーシの強度が問題になります。1mm厚のアルミ板を曲げているだけの構造なので、剛性としてはやはり弱い構造となっています。また、1mm厚のアルミに直接ベアリングを接着しているだけなので、いじっているうちにベアリングが外れたりします。このへんの構造は、再検討が必要になります。 傘歯車どうしのかみ合わせ部分の遊びは、ギヤード側についている傘歯車を写真方向で下に押し下げることによって少なくすることが可能です。 |
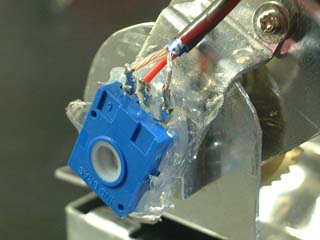 |
【ポテンショメータ】 足首のポテンショメータの取り付け部分です。手抜きでホットボンドで接着しているだけです。これはモータが暴走したときに、ポテンショメータが破損するほどの負荷がかかった場合に外れて保護する目的もありましたが、実際には勝手に外れてしまったりということも起き、逆にモータが暴走する原因にもなってしまいました。 また、ポテンショメータへの配線部分は、写真のようにケーブルから直接ハンダ付けしているだけであり、関節が運動することによる疲労で配線が切れたりといったトラブルも起こりました。配線がきれたら、当然モータの暴走が起きます。 |
■3.体重移動時の姿勢
| 左足への体重移動正面 | 左足への体重移動背面 |
 |
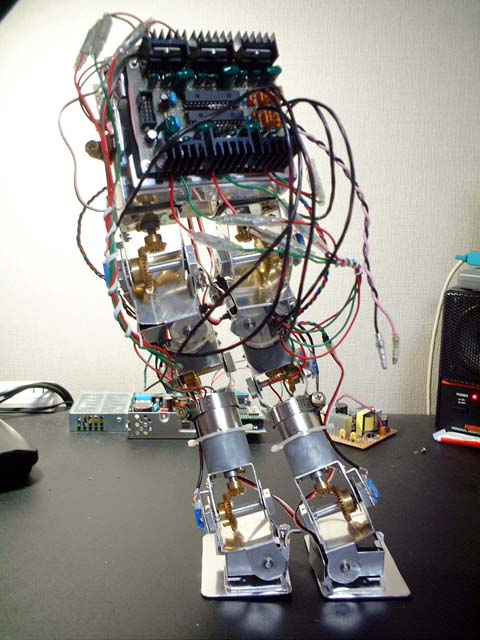 |
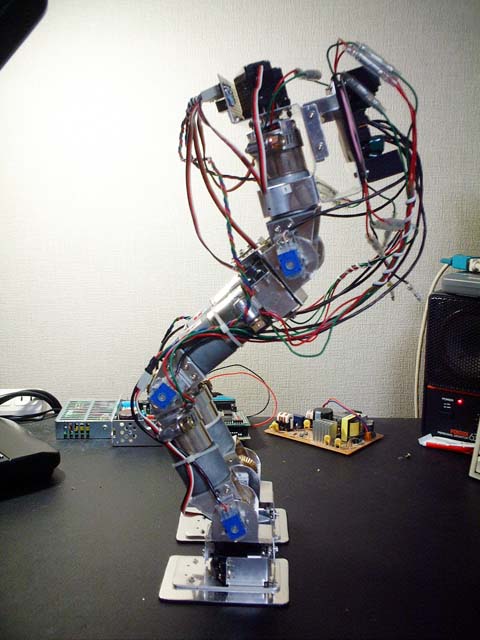
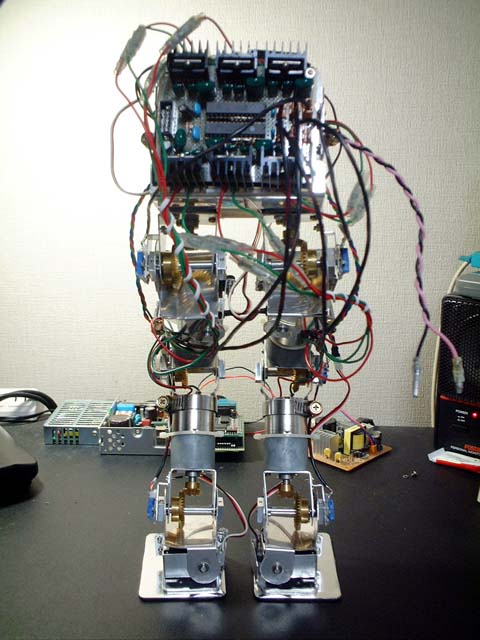
上の写真は、左足に体重を乗せた状態です。TekuRobo2号の構造上の最大の欠点は、両足首と両股関節を結ぶ四角形が、体重移動したときに平行四辺形にならないことです。それは、ヒザを曲げた中腰姿勢では、股関節の開脚方向の軸(股関節のサーボーモータの駆動軸)も太ももと同じ角度で上を向いてしまう構造であることに起因しています。このため、体重移動をした時の股関節の開脚方向の軸は左右対称ではなくなり、単純な姿勢計算が成り立たなくなってしまいます。実際、体重移動を行ったときの上半身は、垂直を保てずに傾き、同時に正面向きも保てていません。
今回、カットアンドトライによる手動での歩行パラメータ作成を行い、一応歩行させることには成功しましたが、今後、逆運動学計算などによって各関節の制御を行おうとした場合、大きな障害になるのではないかと思います。
この構造的な欠陥を、今後どのように解決したら良いのか、今は良い案が思いつきません。股関節の開脚方向の軸も、両足首の軸と同様に、常に正面を向かせる構造が取れれば解決となりますが...。このへんは、TekuRobo3号の構想に盛り込むことに致しましょう。(^^;
 |
今回は、色々と問題点ばかりが目につく報告になってしまいました。(- -; 個々の強度的な問題や、構造的な大きな欠陥を抱えてしまった形になりましたが、別に悲観的になることはありません。今回のTekuRobo2号の製作を通して経験を積むことができ、抑えなければならないポイントも学習することができました。 次は3号機の構想を練って、今度こそは安定したボディーを作り上げたいと思います。また1年後に、このコーナーでお会いしましょう。(^^; |