TekuRobo工作室では、できるだけリアルタイムに進行状況をご紹介したいと思っているのですが、なかなかそうも行かず、実際の進行状況とご報告内容には、どうしても時差が生じます。ここでは、現在の進行状況をとりあえずご報告し、細かな解説は追ってご紹介します、といったあたりの目安にしたいと思います。
【2004/02/02】
ひさびさの3DCADで...
約一年ぶりの3DCADで、ギヤードのステッピングモータによる片足を描いてみました。以前は樹脂系のソリッドモデルで作ってみようと思っていましたが、やはりアルミ板の組合せに戻ってしまいました。それにしても3DCADは難しいですね。色々と守らなければならない約束事があるみたいですが、どうもその辺が分からず、何度も書き直したり、だましだましここまで書けた感じです。また、ここまでアセンブルされた絵になると、我が家のPentium4-1.6GHzのパソコンではファイルの読み込みなどにも時間が掛かります。絵を書くだけで疲れてしまいますが、やはりこれも慣れでしょうか。
ところで、この3DCAD、Paralogixですが、2004年1月31日を持って販売中止になってしまいました!今後はどうなるのか未定です。もともとサーポート無しを謳って安価な価格設定にしていたのですが、やはり発売中止という状況は痛いです。販売中止になっても今まで通り継続して使えるわけですが、バージョンアップやバグ修正版の公開などは行われないのでしょう。3DCADを使うことによってどれだけ作業性がアップしたのかは今のところ疑問ですが、勉強は続けて見たいと思っています。
【2003/02/24】
とりあえず3DCAD...
 |
 |
まだ全然練りが足りないのですが、初の3DCAD作品ということで、とりあえずご紹介することにします。(^^ 基本的には、下でご紹介しているTekuRobo2号と同じですが、アルミ板ではなく樹脂系のソリッドモデルにしてみようかということで書いています。また、左右に体重移動させたときに、両足の着地点と太ももが平行四辺形を保つように、太もも上部の駆動もサーボに変更してみました。 ちょっと足が長すぎなので、ギヤードモータの選定などから、もう一度考え直す必要がありそうです。ただし、高さは2号とほとんど一緒なので、十分歩くとは思います。(^^; なんで片足しか書いていないのかというと、使用している3DCAD Paralogixの利用制限に引っ掛かってしまったためです。力弥が購入したのは廉価版のLevel Oneで、フィーチャ数が50までと制限されていますが、ちょうど片足を書き終えた時点で制限に達してしまったようです。フィーチャー数をどうやって数えているのかがよく分からないのですが、おあずけを食らった状態です。で、くやしいので、とりあえずミラーコピーのプレビューで両足っぽくしてみたのが、右側の絵です。 フィーチャー数の制限を解除するためには、Level Twoにアップグレードするための52,500円が必要になります...。ん〜 お金がないし、片足で止まってしまうのもいやだし、どうしよう...と、またひとつ悩みが増えてしまいました。 (- -; |
【2002/08/25】
とりあえず、歩きました。
 |
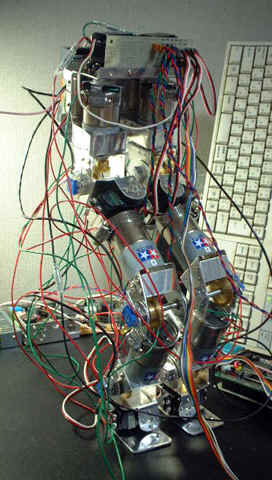
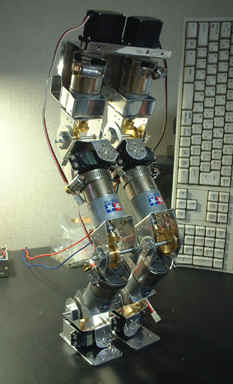
長らくかかってしまいましたが、とりあえず歩きました。というよりも、無理やり歩かせました...といった感じですが (^^; 本当はちょっと前には歩いていたのですが、アクシデントで勢い良く転倒してから右足首の痙攣が治まらなくなり、その後色々と原因調査をしたのですが分からず、といった日々でした。 ギヤードドライバ用のPICのパラメータを変更して、少し反応を鈍く(精度を低く)しても治まらず、ポテンショメータ用のケーブルと動力用のケーブルを束線していたバンドをはずし、全てのケーブル間の距離を離したら、ようやく安定するようになりました。なので、体の周りのケーブルがまとまっていません。 で、やっとムービーが撮れました。ここをクリックするとダウンロードできます。(手持ちのデジカメで撮ったので汚いですが...AVIファイルで2.8MBあります) ムービーでは2歩しか歩かせていません。もともとは3歩以上安定して歩けていたのですが、今はあまり安定しなくなってしまったため、歩いているうちに撮ってしまえ!という感じです。半端ですみません。(^^; TekuRobo2号も構想段階では十分な剛性を持っていると思っていましたが、実際に作ってみると全然ダメですね。お陰でそれなりにノウハウを得ることが出来たと思います。この苦労話は、別の機会にご紹介したいと思います。さて、これを踏まえてTekuRobo3号の構想を練って、最強のロボットを作りましょうか! |
【2002/06/22】
あんまり変わってませんが...
前回の2002/02/07版の写真からあまり進化がありませんが、とりあえず現状をご紹介します。(^^;
 |
 |
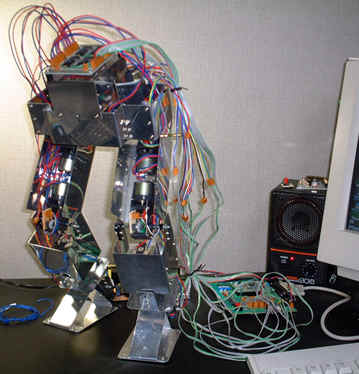
全然まとまっていませんが、電装系として関節にポテンショメータを付けたり、背中に6chのギヤードモータドライバを背負わせたりしてます。最終的には胸の部分にSH2マイコンボードを実装しますが、まだ足元に置いてあります。現在はまだ左右の体重移動しかできません。ちょっと問題なのがギヤードモータドライバの安定性です。ノイズのためだと思いますが、ヒザや足首などが勝手に痙攣(けいれん)を起こしたりするので、それを治すまでは歩行はお預けです。治る目処も立っていませんが...。(- -;
痙攣(けいれん)が治って電装系を整理したら、またここでご紹介します。その頃には歩行のムービーなどが紹介できるとうれしいですね。(^^;
【2002/02/07】
取り合えず組んでみました。
 |
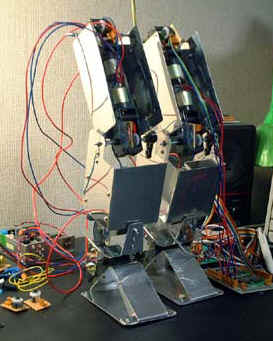
2号機ですが、シャフトと軸受けを入手したので、取り合えずボディーを組んでみました。体はかなりスリムで、身長が40cmとちょっと高めです。脚の太もも部分を前後に振るためのギヤードが胴体部分に入っているため、CPUやバッテリーなどの収容は背中か胸に取り付けることになります。 以前、TekuRoboの広場にもカキコしましたが、実は股関節の機構に構造的な欠陥があります...。ギヤードを使ってコンパクトにまとめるためには、今のところ仕方ないかとも思いますが、今後の改善が必要です。とりあえずは、左右体重移動の際に各サーボモーターの動かし方でカバーしていこうかと思います。 関節部分やその他の部分の剛性はなかなか強く、当面は支障ないかとも思いますが、実際に運動させる段階になると、色々出てくるとは思います。関節部分の更なる剛性が必要になるでしょう。 これからは4ch対応のPICによるサーボコントローラを作り、CPLDかSH2で多チャンネルのPWMを発生させつつ、少しずつ歩かせたいと思います。 電装系がまとまったら、またここでご紹介することにします。
|
【2002/02/01】
シャフトと軸受け出来ました。
 |
専門の金属加工業者さんに頼みました。国井金属株式会社さんです。この写真では分かりませんが、平面4隅の2mm穴と、側面2箇所の2.6mm穴にはネジが切ってあります。 やはりプロの仕事は違いますね。ポテンショメータへのはめ込みも、全く遊びがなくきっちりはまります。 国井金属の水野さんも、ロボット作りに興味を示してくれて、材質選定などでアドバイスを頂いたりしましたし、応援ということで安くして頂いたりしました。感謝です。m(_ _)m 早く組み上げたいところですが、現在、会社の仕事が「超」が付くほど忙しい時期に入ってしまい、なかなか出来そうにありません...。少しずつでも組み上げて行きますので、形になったら、またご紹介します。 |
【2002/01/09】
素人の手仕事に限界を感じます...(-_-;
 |
左の写真はなんでしょう? ヒザなどの関節に利用するシャフトと、それを受けるための軸受けです。軸受けはヒザが空回りしないように、シャフトにしっかりとイモネジ固定できるようにネジを切ってあります。シャフトの右側の少し細くなっているところは、ポテンショメータの軸に遊びなく差し込めるようにしてあります。 ただこれだけのものですが、電動ドリル、ヤスリ、糸ノコで全て手作業で作るのって、非常に大変です。 しかも穴位置などの寸法や、穴の垂直に精度が出ず、ボール盤が必須であることを痛感します。 このセットが関節の数だけ必要になります...。 |
 |
実際の関節では、こんな感じに実装されます。分かりますか? シャフトを固定する軸受け上のイモネジ用のネジ穴は、M2.6のタップでネジ切りをしています。これは簡単に出来るのですが...。 本当は、軸受けの平面上の4個の2mm穴も、M2.0のタップでネジ切りに挑戦したのですが、細いタップ加工って難しいですね。タップが渋くなって、ネジ切りの途中で動かなくなり、ちょっと無理をするとポキッと折れてしまいます。 今回、3本のM2.0タップを折りました...(- -; とりあえずあきらめ、タダの2mm穴にしてしまいましたが、不恰好にナットが見えてしまっています。
|
 |
ヒザを斜めからみると、こんな感じです。 出っ張っているシャフト部分にポテンショメータを差し込みます。 今回はシャフトと軸受けの材質にアルミを使用していますが、強度的に弱く、剛性が保てないでしょう。多分、このシャフトの回転軸には20〜30kg/cm以上のトルクは掛かると思います。 やはり最低、材料には真鍮を使いたいところですが、アルミの削り出し加工だけでひいひい言ってるのに、真鍮したら気が遠くなる気がします... |
 |
左の写真は、ヒザを反対側の正面から見た所です。 シャフトの回転止め部分に、軸受けからのイモネジが食い込んでいる様子が分かりますか? そもそも、軸受け側のネジ山が、アルミのため強度不足だという点が弱点です。つまり、ぎゅっと強力に締め上げることが出来ません。
結論。 シャフトと軸受けは、金属加工業者さんにお願いして作ってもらおう。 現在、個人の趣味に付き合って頂ける業者さんを探しています。 どなたか紹介して頂けませんか? |
【2002/01/05】
TekuRobo2号機の途中経過です...(^^;
 |
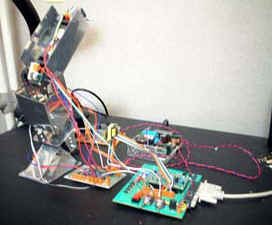
気が付くと、もう3ヶ月ちかくもロボット作りが進んでいませんでした...。 本当にやる気があるのか?と言われる前に、取り合えず最近ようやく着手したロボットのボディ作りの途中経過をご報告しておきたいと思います。といっても、まだ片脚の途中までしか出来ていませんが....(^^; この脚は、前回9/25付けでご報告している構想と展開図を元に作っています。 足首左右方向と股関節の部分にサーボモータを取り付けてあり、それ以外のヒザと足首前後方向はギヤードモータにしてあります。 結構細身で、尺取虫みたいな感じになってしまいましたが、両脚がそろって腰が付いたりすると、それなりに見えるのではないか?と期待しています。 取り合えずは、ボディ作りに専念したいと思いますので、もう少し形になったら、またここでご紹介します。 |
【2001/9/25】
TekuRobo2号の構想を考え直しました。
約2ヶ月前にいったんTekuRobo2号機の構想をまとめましたが、欠点が多くちょっと現実的ではなかったので、改めて考え直してみました。太もも、ヒザ、足首の前後方向の動きには大きなトルクが必要となるため、タミヤのギヤードモータ3633K200を採用し、左右方向の体重移動には細かな角度制御ができるラジコンサーボモータPDS-2144FET(KO PROPO製)を採用します。つまりギヤードとサーボのハイブリット方式です。まだ絵に描いたモチ状態ですので何もいえませんが、展開図の作成も終了しましたので、これからコツコツと作り始めたいと思います。 進捗目標が大幅に遅れてしまいましたが、11月中旬頃までに出来上がれば早い方でしょうか...。
【2001/7/22】
TekuRobo2号の構想がまとまりました。
7/8の時点で、シーケンシャルな動作をさせるためのソフト環境が整ったのですが、現在のマシンでは問題点も多く、なかなか思うように動いてくれません。そこで、早々に見切りを付けて、TekuRobo2号の構想を練ることにしました。まだ、CADの上だけの話ですが、これから各パーツの展開図に進んで、具体的な製作に入ろうかなという段階です。出来上がりの目標は8月末です。
【2001/06/26】
好きな関節を好きなだけ動かせるソフト環境が整いました。
ソフトウエア的に、足腰の8箇所の関節について、好きな場所を好きなだけ動かせるソフトが出来ました。これをもとに、足腰のバランステストやメンテナンスがしやすくなりました。詳細はソフトウエア編202.好きな関節を好きなだけ動かすのページと、アクチュエータ編9.各関節角度とポテンショメータの調整をご覧下さい。
また、少し足腰を強くしました。太ももとヒザを駆動させるギヤボックスをバンドで固定しただけで、大分グニャグニャ感が無くなり(写真左下)、足首の関節部分のアルミ板を0.5mm厚から1.0mm厚に替えただけで結構安定度が増しました(写真右下)。とはいっても、まだ遊びだらけには変わりありませんが...。まあ、少しはマシになりました。(^^;
 |
 |
あと、足首(写真右上)のギヤボックスを試しにパワーアップさせて見ました。マブチモーターを一段大きなものに付け替えたのですが、なかなか良好です。詳しくは、アクチュエータ編10.田宮ギヤボックスのパワーアップをご覧下さい。
【2001/06/08】
8チャンネル対応のハードウエアが整いました。
 |
 |
| 太もも、ヒザ、足首の各前後方向の駆動部分と、つま先を左右に回転させる部分の左右のモーター計8個を、DCモーター駆動回路を経由してAKI-H8に接続しました。また、各モーターの回転角度を検出するためのポテンショメータ出力を、AKI-H8のA/D入力端子に接続しました。これで、屈伸運動とガニマタ/ウチマタ運動ができる環境が整いました。接続のブロック図は、どんなロボットにしようか【2001/06/04】版の■現状の構成で可能な接続と運動を参照して下さい。 これに合わせて、AKI-H8開発ボードのコネクタも追加しました。PIOのBポートコネクタと、A/D5〜8チャンネルの追加です。追加配線については後ほど電子回路編でご紹介します。DCモーター駆動回路の基板は腰の上に取り付けてみましたが、AKI-H8は開発ボードは大きいため別にしています。そのうち小さな基板に載せ替えて腰の上に取り付けます。 上の写真を見ると、重い荷物を背負っていかにも疲れている感じに見えますが、まさにその通りです。重心が上に行くほど足首の強度と遊びが致命的になりつつあります。これから関節ひとつひとつを自由に動かせるソフトウエアを作って、一番バランスの良い姿勢や、関節角度などを探ろうと思いますが、足腰が弱いと姿勢が悪くなるところなどは、人間そっくりです...。 |
|
【2001/05/14】
 |
足が二本になってからちょうど一ヶ月経ちましたが、ようやく腰が付いて下半身の機構が出来上がりました。
問題点は沢山あります。一番の問題は遊びの多さでしょうか。一応ちゃんと立っていますが、結構グニャグニャです。特に足首の遊びが全体の安定度に大きな影響が出るために致命的です。また、ちょっと脚が長めなので、重心が上過ぎるかなあーというのもやっぱり問題ですね。やはり足首の強度やトルク、遊びが一番のネックになりそうです。 足腰で合計12個のギヤボックスを使っています。現在の駆動回路では最大8個のモーターまでしか動かせないため、その辺の周辺回路の増設と、ソフトウエアの検討がこれからの課題です。 一先ずは、複数のモーターの一括制御を行い、ちゃんとした屈伸運動が出来るようにしたいです。
|
【2001/04/13】
 |
今まで脚が一本しかなく、あし!という感じがしなかったのですが、2本にして並べてみると、ようやくあし!という感じに見えるようになりました。(自己満足)
でも、まだ2本の脚を動かすための周辺回路は整っていません。また、腰の部分も早く作りたいと思います。 最近本業のお仕事が忙しく、全然TekuRoboをやっている時間がとれません...。また、ロボット作りを進める以外にも、この工作室で技術的な面の紹介も早く進めたいと思っているので、どこから手をつけようかなあ、といった状態です。 ひとまず、ソフトウエアの紹介と、腰の部分の検討と製作を、出来るだけ進めていきたいと思います。
|
【2001/02/12】
ハードウエア的には【2001/01/08】版と変わりませんが、ひとつひとつの動作を手動で操作するのではなく、あらかじめ設定しておいたデータに基づいて、決められた屈伸運動などの動作パターンを勝手に繰り返すようになりました。
動かしたい関節を指定するmotor[ ]、動かすスピードを指定するspeed[ ]、そして目標の関節角度を指定するpos[ ]という各パラメータを配列変数で用意し、あらかじめ動作のデータを書き込んでおきます。ひとつめの動作が終了したら次の動作に移るようにします。複数の関節を完全に同時には動かせませんが、小刻みに交互に複数の関節を動作させることによって、ある程度の動きが実現します。
今後は、動作のデータをRS-232C経由でパソコンから書き込めるようなソフトを作り、次にはフィードバックによる姿勢制御に進みたいと思います。
【2001/01/08】
現在の進行状況は、以下の写真の通りです。
写真左の灰色の物体が片脚です。ヒザを軽く曲げている状態なのがお分かり頂けますか?一番手前の緑の基板が、秋月電子通商製AKI-H8マイコン用の開発ボードです。AKI-H8マイコンボード自体はもっと小さく、開発ボードの上に載せてある基板です。開発ボードと脚の間にある基板は、DCモーター制御用のパワーICを実装している基板です。机の奥には、DC電源装置が置いてあります。で、写真には写っていませんが、すぐ右側にパソコンがあり、開発ボードとシリアルケーブルで接続してあります。
現状では、開発ボードに取り付けてあるスイッチによる手動制御と、パソコンからのシリアル(RS-232C)通信による遠隔制御まで出来ます。パソコンからの制御は、Windowsのハイパーターミナルを立ち上げ、そこから、どのモーターを、どの回転速度で、どの位置まで動かすか、といったコマンドを打ち込んで動かすレベルです。結局手動制御ですね...。
ソフトウエアの開発は、AKI-H8シリーズで発売されているCコンパイラを利用しています。これから、複数のモーターを連携してシーケンシャルな動作をさせるソフトウエアを考えるところです。
今後、これらを作ってきた過程や手順、行なってきた実験内容、そしてソフトウエア開発手順やプログラムの解説などを、失敗談を交えつつご紹介して行きたいと思いますので、ご期待下さい。